Calling sd card getting failed i am using 16gb sd card with sd card module and source code is follows
/*
This example demonstrates how to read and write an SD card on an ESP32,
using this library contributed by nliviu:
https://github.com/nliviu/sdlib
This example is adapted for ESP32 from this example:
https://github.com/cesanta/esp-idf/blob/master/examples/storage/sd_card/main/sd_card_example_main.c
*/
#include "mgos.h"
#include <stdio.h>
#include <string.h>
#include <sys/unistd.h>
#include <sys/stat.h>
#include "esp_err.h"
#include "esp_log.h"
#include "esp_vfs_fat.h"
#include "driver/sdmmc_host.h"
#include "driver/sdspi_host.h"
#include "sdmmc_cmd.h"
#include "mgos_i2c.h"
#include "mgos_imu.h"
#include "mgos_sd.h"
#define PIN_NUM_MISO 19
#define PIN_NUM_MOSI 23
#define PIN_NUM_CLK 18
#define PIN_NUM_CS 5
static void imu_cb(void *user_data)
{
struct mgos_imu *imu = (struct mgos_imu *)user_data;
float ax, ay, az;
float gx, gy, gz;
float mx, my, mz;
if (!imu) return;
if (mgos_imu_accelerometer_get(imu, &ax, &ay, &az))
LOG(LL_INFO, ("type=%-10s Accel X=%.2f Y=%.2f Z=%.2f",
mgos_imu_accelerometer_get_name(imu), ax, ay, az));
if (mgos_imu_gyroscope_get(imu, &gx, &gy, &gz))
LOG(LL_INFO, ("type=%-10s Gyro X=%.2f Y=%.2f Z=%.2f",
mgos_imu_gyroscope_get_name(imu), gx, gy, gz));
if (mgos_imu_magnetometer_get(imu, &mx, &my, &mz))
LOG(LL_INFO, ("type=%-10s Mag X=%.2f Y=%.2f Z=%.2f",
mgos_imu_magnetometer_get_name(imu), mx, my, mz));
}
void playWithSd()
{
LOG(LL_INFO, ( "%s", "Initializing SD card"));
#ifndef USE_SPI_MODE
LOG(LL_INFO, ( "%s", "Using SDMMC peripheral"));
sdmmc_host_t host = SDMMC_HOST_DEFAULT();
gpio_set_pull_mode(15, GPIO_PULLUP_ONLY); // CMD, needed in 4- and 1- line modes
gpio_set_pull_mode(2, GPIO_PULLUP_ONLY); // D0, needed in 4- and 1-line modes
gpio_set_pull_mode(4, GPIO_PULLUP_ONLY); // D1, needed in 4-line mode only
gpio_set_pull_mode(12, GPIO_PULLUP_ONLY); // D2, needed in 4-line mode only
gpio_set_pull_mode(13, GPIO_PULLUP_ONLY); // D3, needed in 4- and 1-line modes
#endif //USE_SPI_MODE
LOG(LL_INFO, ("%s", "**************************************"));
LOG(LL_INFO, ("%s", "**************************************"));
LOG(LL_INFO, ("%s", "Using SPI peripheral"));
LOG(LL_INFO, ("%s", "Playing with SD!!!!!"));
//sdmmc_host_t host = SDSPI_HOST_DEFAULT();
sdspi_slot_config_t slot_config = SDSPI_SLOT_CONFIG_DEFAULT();
slot_config.gpio_miso = PIN_NUM_MISO;
slot_config.gpio_mosi = PIN_NUM_MOSI;
slot_config.gpio_sck = PIN_NUM_CLK;
slot_config.gpio_cs = PIN_NUM_CS;
// Options for mounting the filesystem.
// If format_if_mount_failed is set to true, SD card will be partitioned and
// formatted in case when mounting fails.
esp_vfs_fat_sdmmc_mount_config_t mount_config =
{
.format_if_mount_failed = false,
.max_files = 5,
.allocation_unit_size = 16 * 1024
};
// Use settings defined above to initialize SD card and mount FAT filesystem.
// Note: esp_vfs_fat_sdmmc_mount is an all-in-one convenience function.
// Please check its source code and implement error recovery when developing
// production applications.
sdmmc_card_t* card;
esp_err_t ret = esp_vfs_fat_sdmmc_mount("/sdcard", &host, &slot_config, &mount_config, &card);
if (ret != ESP_OK)
{
if (ret == ESP_FAIL)
{
LOG(LL_INFO, ("%s", "Failed to mount filesystem. If you want the card to be formatted, set format_if_mount_failed = true."));
}
else
{ LOG(LL_INFO, ("%s", "**************************************"));
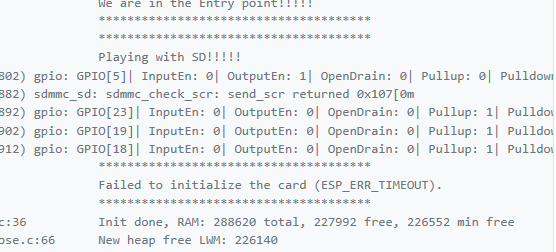
LOG(LL_INFO, ("Failed to initialize the card (%s). ", esp_err_to_name(ret)));
LOG(LL_INFO, ("%s", "**************************************"));
}
return;
}
// Card has been initialized, print its properties
sdmmc_card_print_info(stdout, card);
// Use POSIX and C standard library functions to work with files.
// First create a file.
LOG(LL_INFO, ("%s", "Opening file"));
FILE* f = fopen("/sdcard/hello.txt", "w");
if (f == NULL)
{
LOG(LL_INFO, ("%s","Failed to open file for writing"));
return;
}
fprintf(f, "Hello %s!\n", card->cid.name);
fclose(f);
LOG(LL_INFO, ("%s","File written"));
// Check if destination file exists before renaming
struct stat st;
if (stat("/sdcard/foo.txt", &st) == 0)
{
// Delete it if it exists
unlink("/sdcard/foo.txt");
}
// Rename original file
LOG(LL_INFO, ("%s","Renaming file"));
if (rename("/sdcard/hello.txt", "/sdcard/foo.txt") != 0)
{
LOG(LL_INFO, ("%s","Rename failed"));
return;
}
// Open renamed file for reading
LOG(LL_INFO, ("%s","Reading file"));
f = fopen("/sdcard/foo.txt", "r");
if (f == NULL)
{
LOG(LL_INFO, ("%s","Failed to open file for reading"));
return;
}
char line[64];
fgets(line, sizeof(line), f);
fclose(f);
// strip newline
char* pos = strchr(line, '\n');
if (pos)
{
*pos = '\0';
}
LOG(LL_INFO, ("Read from file: %s", line));
// All done, unmount partition and disable SDMMC or SPI peripheral
esp_vfs_fat_sdmmc_unmount();
LOG(LL_INFO, ("%s", "Card unmounted"));
LOG(LL_INFO, ("%s", "**************************************"));
LOG(LL_INFO, ("%s", "**************************************"));
}
enum mgos_app_init_result mgos_app_init(void)
{
playWithSd();
struct mgos_i2c *i2c = mgos_i2c_get_global();
struct mgos_imu *imu = mgos_imu_create();
struct mgos_imu_acc_opts acc_opts;
struct mgos_imu_gyro_opts gyro_opts;
struct mgos_imu_mag_opts mag_opts;
if (!i2c) {
LOG(LL_ERROR, ("I2C bus missing, set i2c.enable=true in mos.yml"));
return false;
}
if (!imu) {
LOG(LL_ERROR, ("*******************************Cannot create IMU***************\n\n\n"));
return false;
}
acc_opts.type = ACC_MPU9250;
acc_opts.scale = 16.0; // G
acc_opts.odr = 100; // Hz
if (!mgos_imu_accelerometer_create_i2c(imu, i2c, 0x68, &acc_opts))
LOG(LL_ERROR, ("Cannot create accelerometer on IMU"));
gyro_opts.type = GYRO_MPU9250;
gyro_opts.scale = 2000; // deg/sec
gyro_opts.odr = 100; // Hz
if (!mgos_imu_gyroscope_create_i2c(imu, i2c, 0x68, &gyro_opts))
LOG(LL_ERROR, ("Cannot create gyroscope on IMU"));
mag_opts.type = MAG_AK8963;
mag_opts.scale = 12.0; // Gauss
mag_opts.odr = 10; // Hz
if (!mgos_imu_magnetometer_create_i2c(imu, i2c, 0x0C, &mag_opts))
LOG(LL_ERROR, ("Cannot create magnetometer on IMU"));
LOG(LL_INFO, ("%s", "We are in the Entry point!!!!!"));
mgos_set_timer(1000, true, imu_cb, imu);
return MGOS_APP_INIT_SUCCESS;
}
error as follows
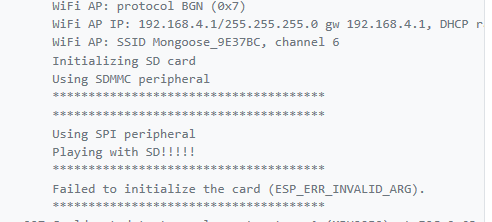
and error is